7. Integración numérica#
7.1. Introducción#
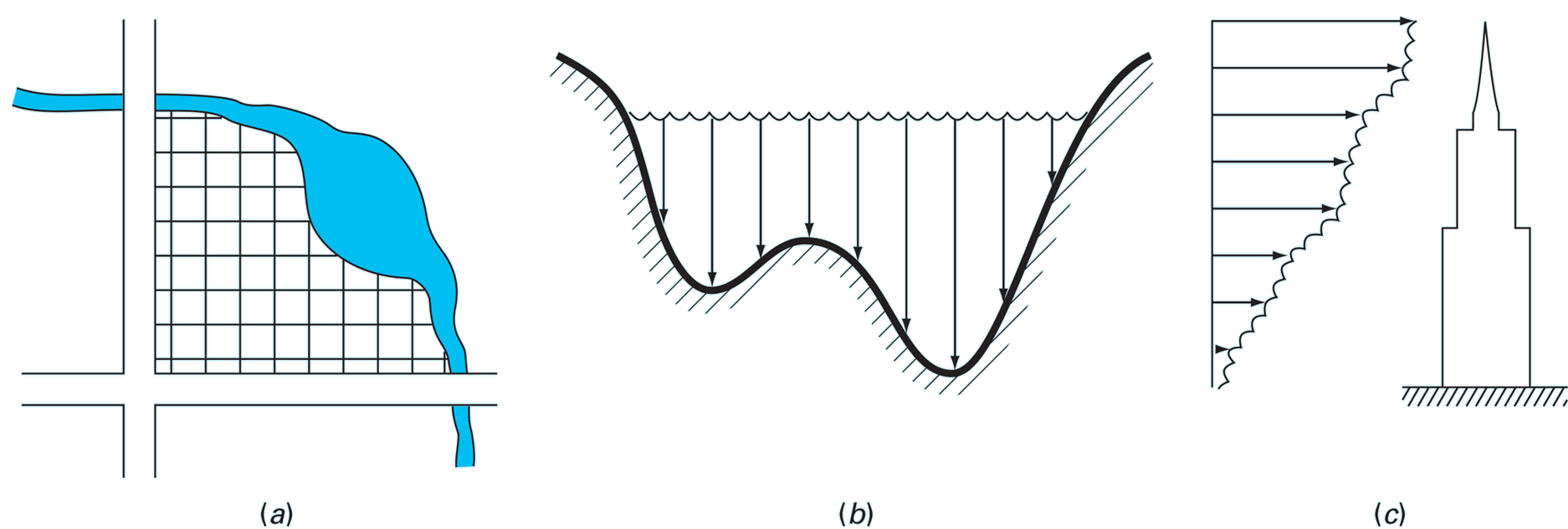
El cálculo de integrales es fundamental en todos los problemas de ingeniería. Muchos ejemplos tienen relación directa con la estimación de áreas: (a) La superficie de un campo limitado por dos carreteras y un rio, (b) El área transversal de un canal, (c) La fuerza de arrastre sobre un edificio ocasionada por el viento.
En este capítulo revisaremos dos métodos de integración (1) Fórmulas de Newton-Cotes para datos tabulados de una función desconocida (2) Integrales para funciones conocidas
7.2. Integración mediante datos tabulados (Fórmulas de Newton-Cotes)#
Queremos aproximar la integral de una función \(f(x)\) en el intervalo \(x\in[a,b]\).
Sin embargo, en este caso, la función es desconocida y solamente contamos con datos tabulados \(x_i\), y \(f(x_i)\)
Asumamos:
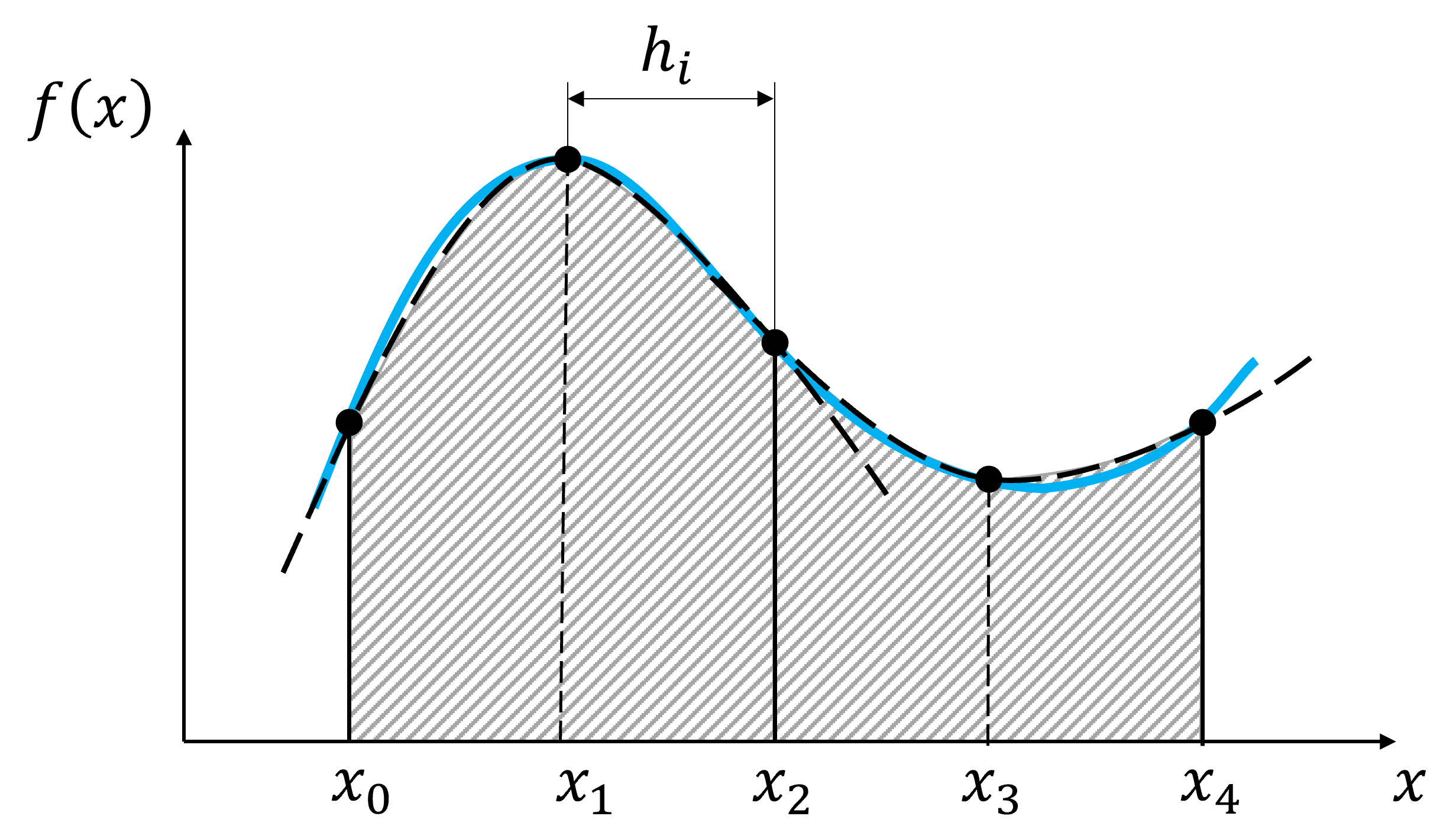
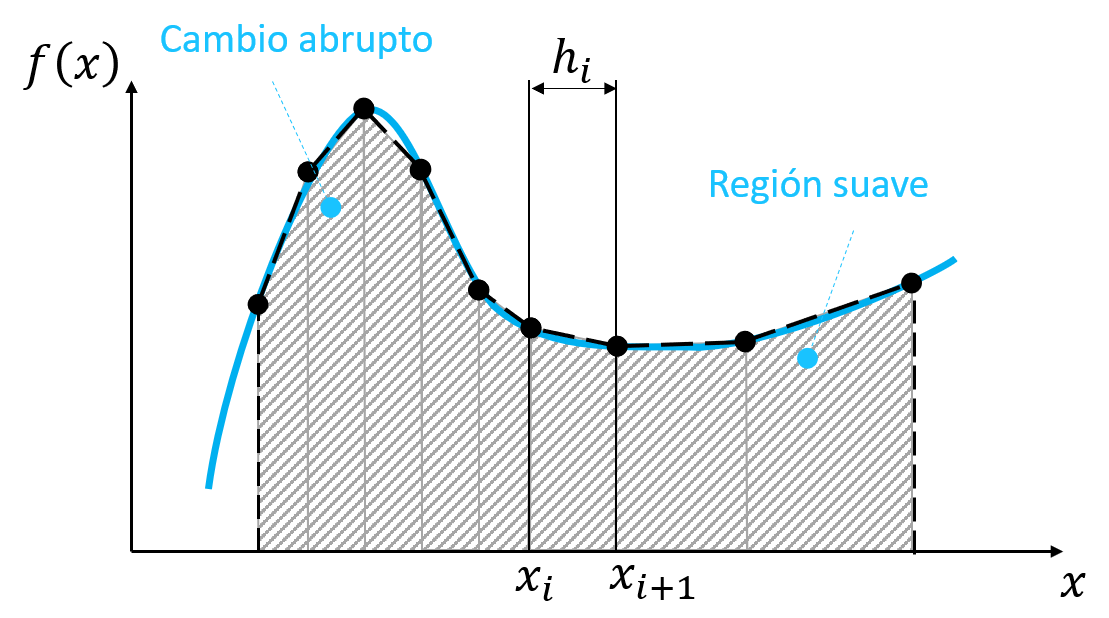
Intervalo discretizado por \(n+1\) puntos \(\{x_0, x_1, ... x_i, ...., x_n\}\), con \(x_0 = a\) y \(x_n = b\)
Subintervalo entre dos puntos \(x_{i+1}\) y \(x_i\) definido por \(h_i =x_{i+1} - x_{i}\).
Valores \(\{f(x_0), f(x_1), ... f(x_i), ...., f(x_n)\}\), conocidos.
Las fórmulas de Newton-Cotes se basan en la aproximación de una función \(f(x)\) mediante polinomios generados a partir de los datos tabulados \(x_i\) y \(f(x_i)\)
7.2.1. Integral de Riemann#
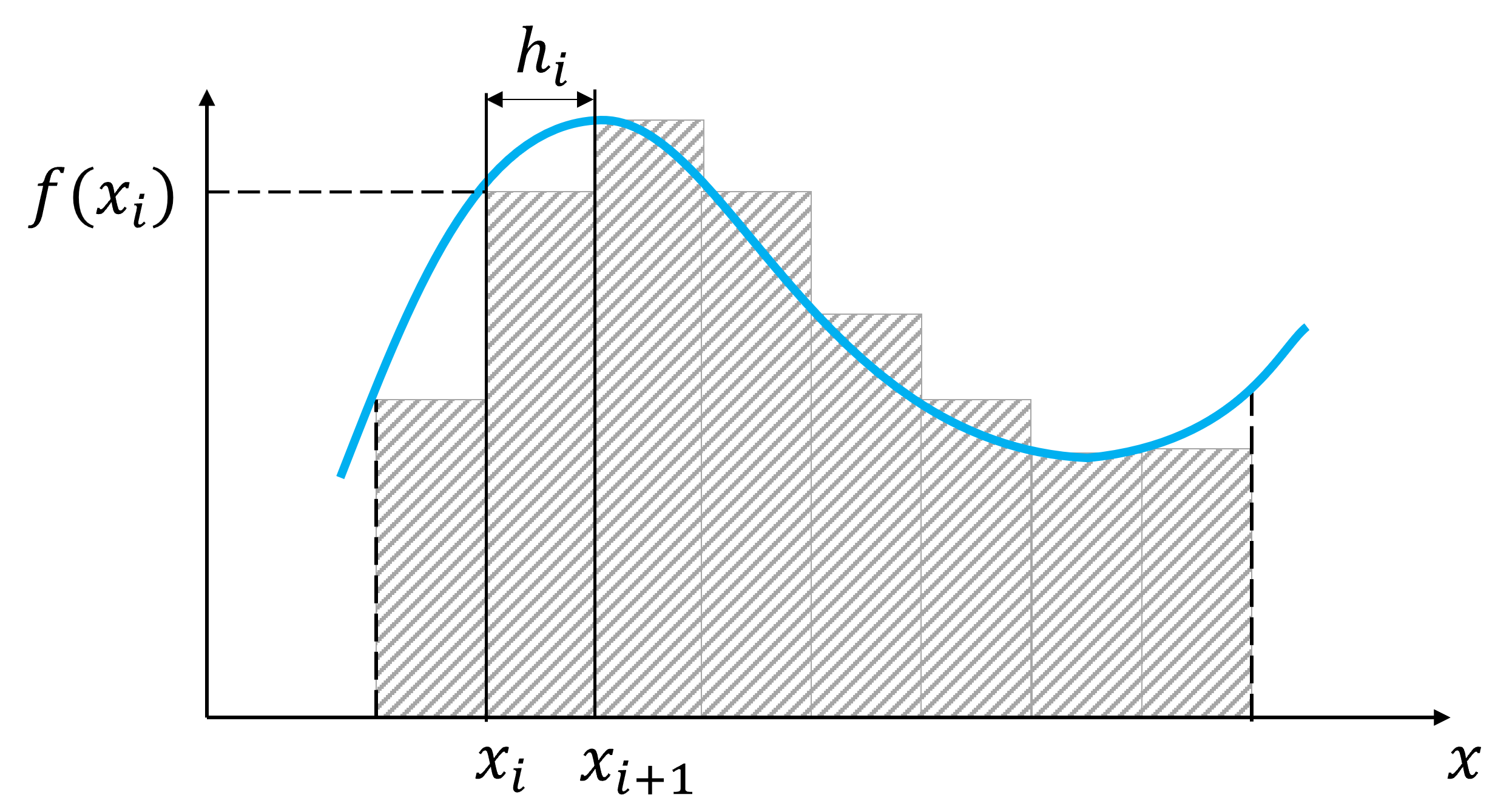
El caso más sencillo consiste en aproximar \(f(x)\) en el subintervalo \(x\in[x_{i+1}, x_i]\) mediante un polinomio de grado 0. La elección más lógica sería \(f(x) \approx f(x_i)\) o \(f(x) \approx f(x_{i+1})\), ya que estos puntos son conocidos por la tabulación.
Matemáticamente:
dependiendo de si tomamos el valor de la izquierda o derecha del tramo, respectivamente.
En otras palabras, aproximamos el área bajo cada subintervalo mediante un rectángulo.
Mediante series de Taylor podemos caracterizar el error de esta aproximación. Por simplicidad, consideramos un conjunto de \(n+1\) puntos igualmente espaciados con \(h_i = h = \frac{b-a}{n}\).
Considerando la integral en subintervalos de ancho \(h\), podemos expresar la integral como:
Luego, para cada subintervalo \(x\in[x_{i+1}, x_i]\), consideremos la expansión de Taylor de \(f(x)\) centrada en \(x_i\):
Reemplazando en cada integral del subintervalo \(x\in[x_{i+1}, x_i]\), tenemos:
Reemplazando en la integral para el intervalo \(x\in[a,b]\), tenemos que el error de truncamiento es \(nO(h^2)\).
Finalmente, mediante la relación \(h = \frac{b - a}{n}\), deducimos que la aproximación de Riemmann induce un error de truncamiento:
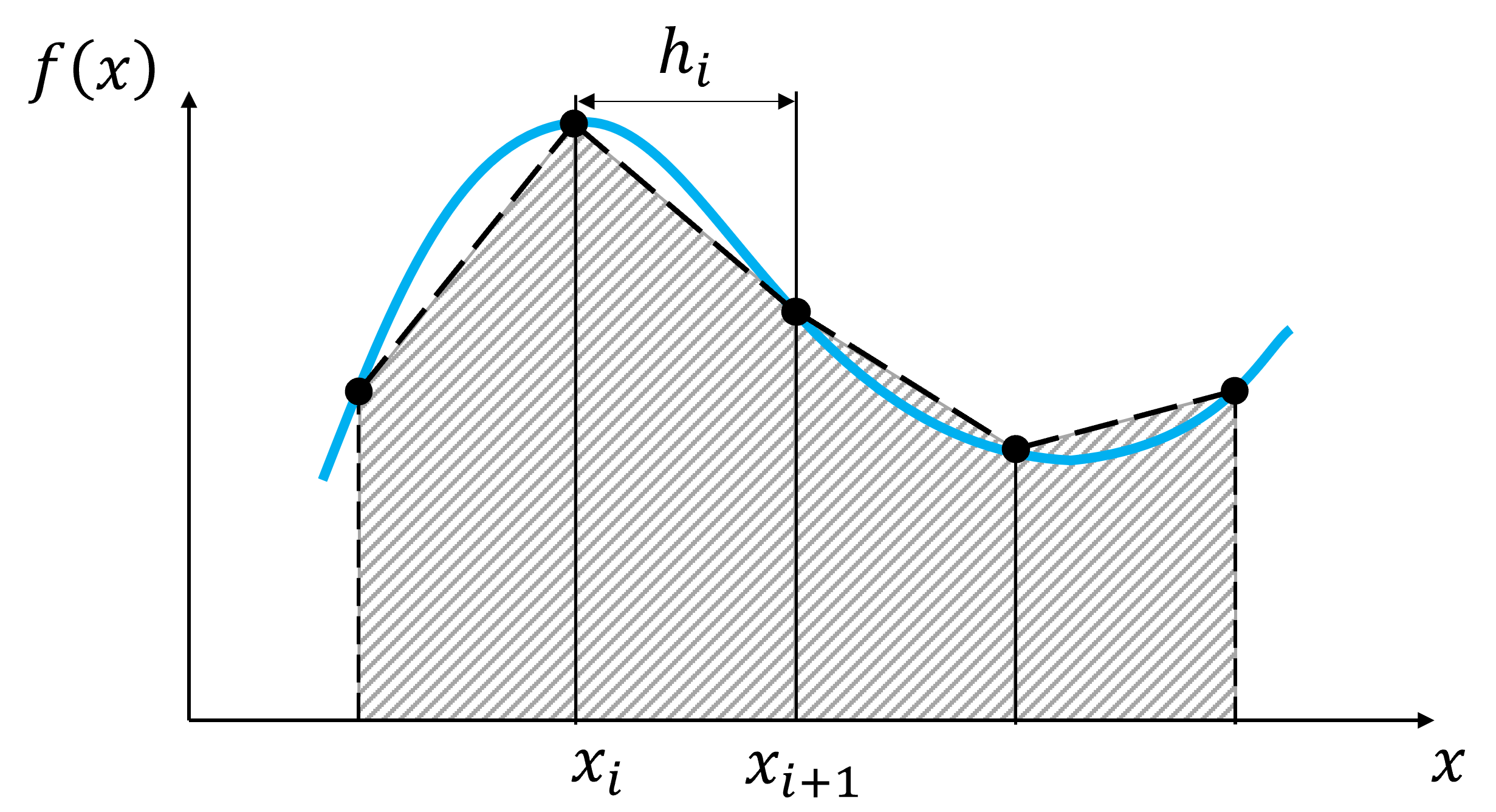
7.2.2. Regla del trapecio (scipy.integrate.trapezoid)#
Podemos mejorar la aproximación mediante una expansión de segundo orden.
Reemplazando en la integral del subintervalo \(x\in [x_i, x_{i+1}]\):
Aproximando la derivada como: \(f^{\prime}(x_i) = \frac{f(x_{i+1}) - f(x_i)}{x_{i+1} - x_i} + O(h)\), obtenemos la regla del trapecio:
Considerando un conjunto de \(n+1\) puntos igualmente espaciados en el intervalo \(x\in[a,b]\), la regla del trapecio extendida o compuesta es:
donde \(h = \frac{b -a}{n}\)
En python tenemos la función trapezoid de la librería scipy.integrate. La función también puede ser llamada como trapz (alias).
Para utilizar la función debemos indicar los valores de \(f(x_i)\) (variable yi) en el primer argumento de la función y los \(x_i\) (variable xi) en el segundo:
from scipy.integrate import trapezoid
trapz_int = trapezoid(yi,xi) # Integral de f(x) mediante regla del trapecio
scipy.integrate.trapezoidno requiere que los valores dexiesten igualmente espaciados. Sin embargo, para mejor control del error, es recomendable mantener subintervalos \(h\) de igual tamaño.
Más información en la documentación oficial
Por ejemplo, consideremos la integral:
considerando un arreglo de puntos igualmente espaciados con \(h = \pi/10\):
import numpy as np
import scipy.integrate as spint
# import numpy as np
a, b = 0, np.pi # intervalo de integración
h = (b-a)/100 # tamaño de subintervalo
xi = np.arange(a,b,h) # conjunto de puntos xi
yi = np.sin(xi)
int_trpz = spint.trapezoid(yi, xi) # Regla del trapecio (usando scipy)
# int_trpz = np.trapz(yi, xi) # Regla trapecio (usando numpy)
print('Regla trapecio: %.3f' % int_trpz)
print('Error absoluto %.3e' % abs(2 - int_trpz))
print('Error O(h^2) = O(%.3e)' % h**2)
Regla trapecio: 1.999
Error absoluto 6.579e-04
Error O(h^2) = O(9.870e-04)
El error es menor que \(h^2 \approx 9.870\times 10^{-2}\)
La función
trapztambién está disponible desde la libreríanumpy. La función es similar a la disponible porscipy.
7.2.3. Regla de Simpson 1/3 (scipy.integrate.simpson)#
En términos generales, lo que hicimos en la regla del trapecio y Riemann es aproximar \(f(x)\) por un polinomio y luego integrarlo en cada subintervalo \(x\in [x_i, x_{i+1}]\). El error de truncamiento disminuye a medida que aumentamos el orden del polinomio.
La regla de Simpson sigue esta lógica, aunque utilizando polinomios de interpolación de Lagrange en lugar de expansiones de Taylor.
Los polinomios de interpolación de Lagrange están dados por la fórmula:
donde \(P_i(x)\), son las bases polinómicas definidas por:
Por ejemplo, la regla de Simpson 1/3 considera polinomios de Lagrange de segundo orden:
Al integrar el polinomio en el subintervalo \(x\in [x_{i-1}, x_{i+1}]\) determinamos la regla de Simpson 1/3:
Notar que el orden del polinomio es 1 grado mayor que en el caso del trapecio. Sin embargo, el error de truncamiento es \(O(h^5)\) (ver demostración)
Para un conjunto de \(n+1\) puntos igualmente espaciados en el intervalo \(x\in[a,b]\), la regla de Simpson 1/3 extendida o compuesta es:
Notar que, debido a que la regla de Simpson 1/3 requiere de dos intervalos, el número de puntos debe ser impar.
En python tenemos la función simpson de la librería scipy.integrate. La función también puede ser llamada como simps (alias).
Para utilizar la función debemos indicar los valores de \(f(x_i)\) (variable yi) en el primer argumento de la función y los \(x_i\) (variable xi) en el segundo:
from scipy.integrate import simpson
int0 = simpson(yi,xi) #integral de yi mediante regla del trapecio
scipy.intergrate.simpson no requiere que el número de puntos xi sea impar, ni que estén igualmente espaciados. Sin embargo, para mejor control del error, es recomendable mantener subintervalos de igual tamaño (\(h\) constante).
Si el número de puntos xi es par, la función simpson, por defecto, considera el promedio entre:
Regla de Simpson para los primeros \(n-1\) intervalos y trapecio en el último intervalo
Regla de Simpson para los últimos \(n-1\) intervalos y trapecio en el primer intervalo.
Esto inmediatamente aumenta el error de truncamiento a \(O(h^3)\).
Más información en la documentación oficial
Nuevamente, consideremos la integral:
considerando un arreglo de 10, 11 y 12 puntos igualmente espaciados:
import numpy as np
import scipy.integrate as spint
# 10 puntos igualmente espaciados
xi = np.linspace(0,np.pi,10)
int_sim10 = spint.simpson(y = np.sin(xi), x = xi)
# 11 puntos igualmente espaciados
xi = np.linspace(0,np.pi,11)
int_sim11 = spint.simpson(y = np.sin(xi), x = xi)
# 12 puntos igualmente espaciados
xi = np.linspace(0,np.pi,12)
int_sim12 = spint.simpson(y = np.sin(xi), x = xi)
print('Regla Simpson 1/3 (10 pts): %.5f' % int_sim10)
print('Error absoluto %.3e\n' % abs(2 - int_sim10))
print('Regla Simpson 1/3 (11 pts): %.5f' % int_sim11)
print('Error absoluto %.3e\n' % abs(2 - int_sim11))
print('Regla Simpson 1/3 (12 pts): %.5f' % int_sim12)
print('Error absoluto %.3e\n' % abs(2 - int_sim12))
Regla Simpson 1/3 (10 pts): 2.00075
Error absoluto 7.487e-04
Regla Simpson 1/3 (11 pts): 2.00011
Error absoluto 1.095e-04
Regla Simpson 1/3 (12 pts): 2.00034
Error absoluto 3.406e-04
En comparación con la integral de 11 puntos, notamos que el error de scipy.integrate.simpson es mayor cuando usamos 12 puntos.
Esto ocurre debido a que, internamente, scipy.integrate.simpson considera regla del trapecio para el primer y/o último intervalo impar. La diferencia en el error es el castigo por considerar un método de orden de truncamiento mayor.
7.3. Integración de funciones evaluadas#
Las fórmulas de Newton-Cotes son útiles cuando no conocemos la función y solo disponemos de datos tabulados.
Si la función a integrar es conocida, las fórmulas de Newton-Cotes aún son válidas. Sin embargo, existen métodos más eficientes para calcular la integral numéricamente.
7.3.1. Cuadratura Gaussiana (scipy.integrate.fixed_quad)#
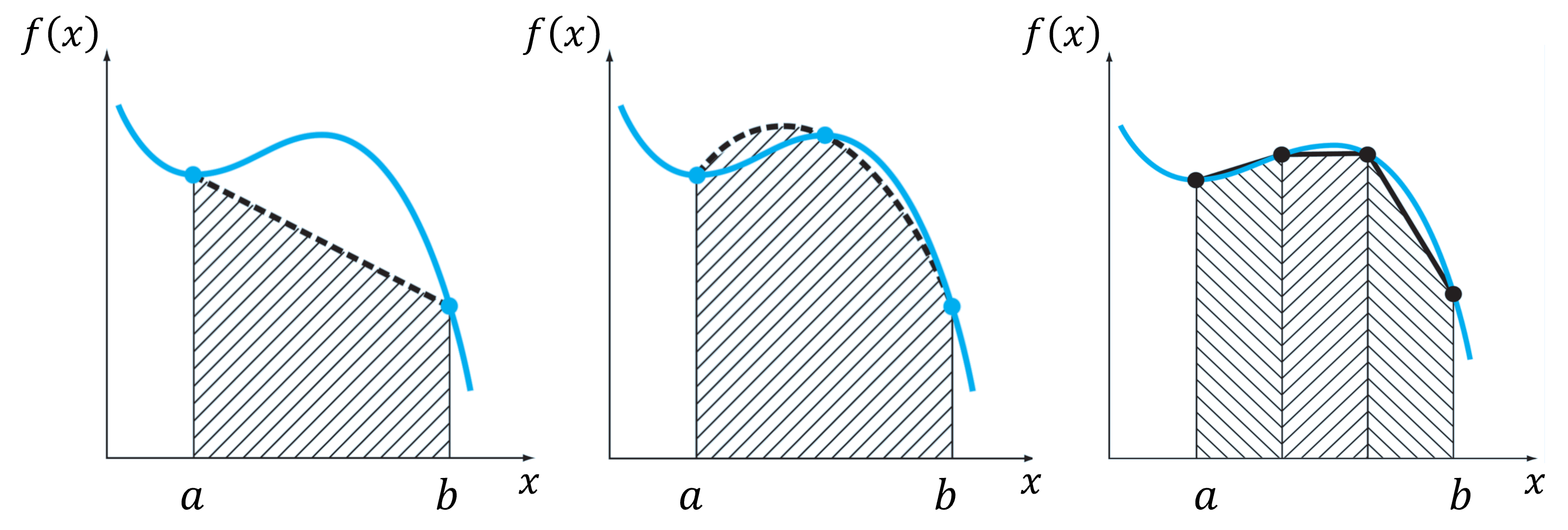
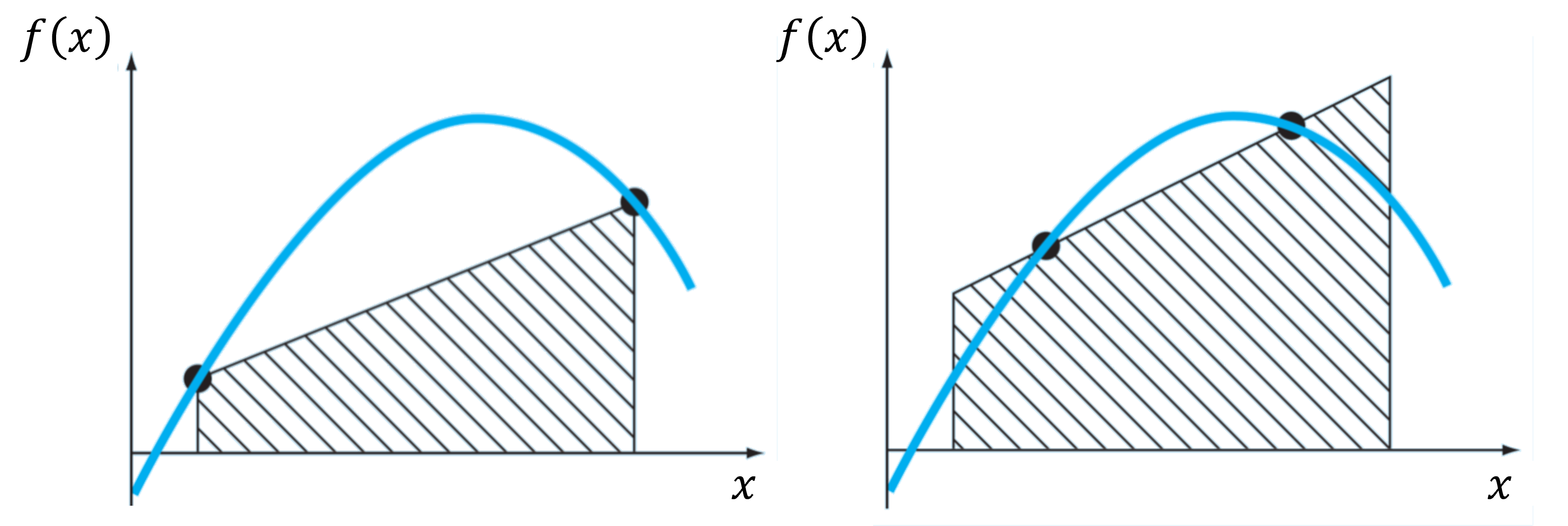
En la regla del trapecio aproximamos la integral por el área bajo una línea conectando dos puntos. Tal como indica la figura de abajo, podemos mejorar este resultado buscando un trapecio que, conectando dos puntos de la curva, minice el error de la aproximación.
Considere la forma general para aproximar una integral en el intervalo \(x\in[-1,1]\), mediante dos puntos \(x_0\) y \(x_1\)
En el caso de la regla del trapecio tenemos \(x_0 = -1\), \(x_1 = 1\), y \(c_0=c_1=h/2\). Recordemos que esta fórmula fue derivada mediante la aproximación de \(f(x)\) por un polinomio de grado 1.
Sin embargo, si liberamos las restricciones para \(c_0\), \(c_1\), \(x_0\), \(x_1\), tenemos un problema 4 incognitas.
Debido a que ahora necesitamos 4 ecuaciones, aproximaremos la función a un polinomio de grado 3, de la forma \(f(x) \approx a_0 + a_1x+ a_2x^2+a_3x^3\). Esto nos permitirá derivar las 4 ecuaciones para determinar \(c_0\), \(c_1\), \(x_0\), \(x_1\).
Mediante la aproximación, \(f(x) \approx a_0 + a_1x+ a_2x^2+a_3x^3\), e integrando a ambos lados de la ecuación de cuadratura, derivamos el siguiente sistema de ecuaciones:
cuya solución es \(c_0 = c_1 = 1\), \(x_0 = -1/\sqrt{3}\), y \(x_1 = 1/\sqrt{3}\).
El resultado se conoce como regla de cuadratura gaussiana de orden 2:
Debido a que la función fue aproximada por un polinomio grado 3, la aproximación de la integral tiene un error del orden \(O(h^5)\).
Mediante un procedimiento similar, podemos generar aproximaciones para polinomios de orden mayor. La siguiente tabla resume la lista de pesos \(c_i\) y puntos de evaluación \(x_i\), junto a sus respectivos errores de truncamiento:
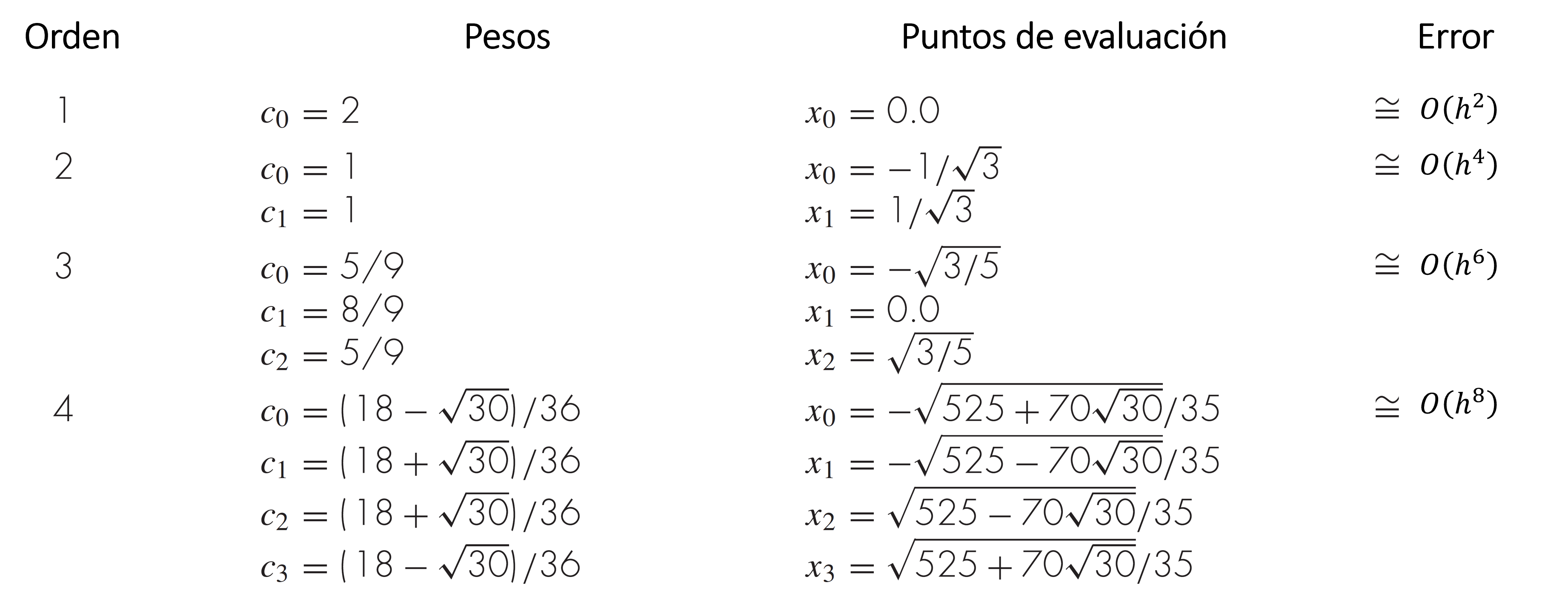
Notar que el error de truncamiento de cuadratura Gaussiana disminuye con el orden, \(n\), en la forma \(O(h^{2n+1})\).
Si bien, las reglas de cuadratura gaussiana están diseñadas para integrales en el dominio \(x\in[-1, 1]\), podemos generalizarlas al intervalo \(x\in[a,b]\) mediante cambio de variables.
En este caso, las reglas de cuadratura gaussiana toman la forma:
donde \(x_i\) y \(c_i\) corresponden a los valores indicados en la tabla 1.
En python tenemos la función fixed_quad para cuadratura Gaussiana, implementada en la librería scipy.integrate.
Para calcular la cuadratura llamamos la función como fixed_quad(f,a,b,n)[0], donde:
f: función \(f(x)\) en formato callablea, b: intervalo de integración \(a\) y \(b\)n: número de puntos o orden \(n\) (n=5por defecto).
fixed_quad, por defecto, retorna un tuple de dos elementos, de los cuales el primero corresponde al valor de la integral. El término [0] al final de la función se utiliza para retornar, únicamente, el valor de la integral.
Más información en la documentación oficial
Por ejemplo, utilizamos cuadratura Gaussiana de 2 puntos para aproximar la integral:
from scipy.integrate import fixed_quad
f = lambda x: np.sin(x) # función tipo callable
a, b = 0, np.pi # intervalo de integración
fixed_quad(f,a,b,n=2)[0] # cuadratura Gaussiana de 2 puntos
1.9358195746511373
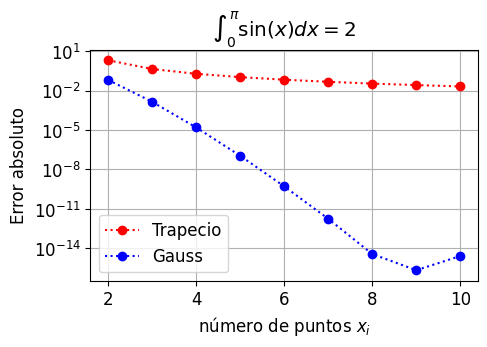
Comparemos el error de la cuadratura Gaussiana con la regla del trapecio a medida que aumentamos el número de puntos de evaluación.
import numpy as np
from scipy.integrate import fixed_quad, trapezoid
N = 10 # máximo número de puntos de integración
f = lambda x: np.sin(x) # función en formato callable
a, b = 0, np.pi # intervalo de integración
I0 = 2 # valor exacto de la integral
Etrapz_arr = [] # generamos una lista vacía para guardar los resultados de "trapz"
Egauss_arr = [] # generamos una lista vacía para guardar los resultados de "fixed_quad"
for n in range(2,N+1):
xi = np.linspace(a,b,n)
# error regla del trapecio
Etrapz = abs(I0 - trapezoid(f(xi),xi))
Etrapz_arr.append(Etrapz)
# error cuadratura de Gauss
Egauss = abs(I0 - fixed_quad(f,a,b,n=n)[0])
Egauss_arr.append(Egauss)
import matplotlib.pyplot as plt
plt.figure(figsize = (5, 3)) # Tamaño de lienzo
plt.rcParams.update({'font.size': 12}) # Tamaño de fuente
plt.plot(list(range(2,N+1)), Etrapz_arr,'o:r', label='Trapecio')
plt.plot(list(range(2,N+1)), Egauss_arr,'o:b', label='Gauss')
# Formateamos los ejes y títulos del gráfico
plt.yscale('log')
plt.xlabel('número de puntos $x_i$')
plt.ylabel('Error absoluto')
plt.title('$\int_0^\pi \sin(x) dx = 2$')
plt.grid()
plt.legend()
plt.show()
7.3.2. Cuadratura adaptativa (scipy.integrate.quad)#
Los métodos de cuadratura adaptativa son los más utilizados hoy en dia. Estos métodos toman en cuenta cambios abruptos en regiones acotadas de una función, refinando el valor de \(h\) directamente en estos intervalos.
Aunque existen diversos tipos, podemos resumir el procedimiento mediante los siguientes pasos:
Supongamos que tenemos dos estimaciones \(I_1\) y \(I_2\) de la integral: \begin{equation*} I = \int_a^b f(x) dx, \end{equation*} donde \(I_1\) corresponde a la aproximación más precisa.
Determine el error absoluto \(\epsilon = I_1 - I_2\).
Si \(\epsilon < \tau\), donde \(\tau\) es la tolerancia, aceptamos \(I_1\) como aproximación de \(I\). En caso contrario, subdividimos el intervalo \(x\in[a,b]\) en dos subintervalos:
y repetimos el paso (1) para cada integral.
Para calcular las estimaciones \(I_1\) y \(I_2\) se utiliza algún método de cuadratura estática, como por ejemplo, cuadratura de Gauss.
En python tenemos la función quad para cuadratura adaptativa, implementada en la librería scipy.integrate. Esta función se basa en la librería QUADPACK de FORTRAN. Para evaluar \(I_1\) y \(I_2\), quad utiliza una variante de la cuadratura de Gauss, llamada Gauss–Kronrod
Por defecto, quad retorna un tuple con dos elementos. El primero corresponde al valor de la integral, el segundo al error absoluto de la estimación.
from scipy.integrate import quad
f = lambda x: np.sin(x) # función tipo callable
a, b = 0, np.pi # intervalo de integración
print('Valor de la integral = %.5f' % quad(f,a,b)[0])
print('Error absoluto = %.5e' % quad(f,a,b)[1])
Valor de la integral = 2.00000
Error absoluto = 2.22045e-14
quad también permite determinar integrales impropias.
Por ejemplo, consideremos la integral
from scipy.integrate import quad
f = lambda x: np.exp(-x**2) # función tipo callable
a, b = -np.inf, np.inf # intervalo de integración
print('I = %.5f; E. absoluto = %.5e' % quad(f,a,b))
I = 1.77245; E. absoluto = 1.42026e-08
Mediante los argumentos epsabs y epsrel, podemos condicionar la tolerancia respecto al error absoluto y relativo, respectivamente:
quad(f,a,b,epsabs=1E-5) # Tolerancia absoluta de 0.00001
quad(f,a,b,epsrel=1E-2) # Tolerancia relativa del 1%
Por defecto,
epsabs=1.49e-08, yepsrel=1.49e-08.
También podemos ajustar el número máximo de subdivisiones del dominio mediante limit.
quad(f,a,b,limit=20) # 20 subintervalos como máximo
Por defecto,
limit=50.
Más información en la documentación oficial
7.4. Referencias#
Kong Q., Siauw T., Bayen A. M. Chapter 21: Numerical Integration in Python Programming and Numerical Methods – A Guide for Engineers and Scientists, 1st Ed., Academic Press, 2021
Chapra S., Canale R. Capítulo 21: Fórmula de integración de Newton-Cotes en Métodos Numéricos para Ingenieros, 6ta Ed., McGraw Hill, 2011
Chapra S., Canale R. Capítulo 22: Integración de ecuaciones en Métodos Numéricos para Ingenieros, 6ta Ed., McGraw Hill, 2011
Williams H. P. Chapter 4: Integration of Functions in “Numerical Recipes” 3rd Ed, Cambridge University Press, 2007